ヤマザキマザックがこのほど、製造現場の働き方を支援する協働ロボット自動化セル「Ez LOADER 10(イージーローダー10)」の販売を開始した。
昨今、各産業では人手不足やコロナ禍などを背景として、働き方の見直しが求められ、製造現場では人的資源を高付加価値の業務にシフトし、反復作業をロボットで代替する動きが広がっている一方、ロボットは導入後の移設が困難であるため、設備機ごとで生産量の変動が激しい小規模企業では導入の障害ともなっている。このような背景を踏まえ、同社では誰でも簡単にセットアップが可能で、導入後の移設にフレキシブルに対応する自動化セル「Ez LOADER 10」の開発に至った。
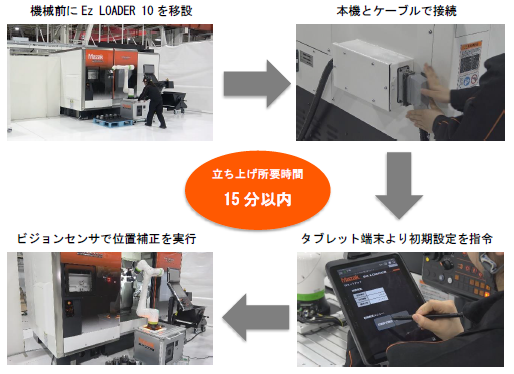
「Ez LOADER 10」は協働ロボットとビジョンセンサ、専用ソフトウェア内蔵のタブレット端末で構成。協働ロボットの採用により安全・コンパクトな自動化システムの構築を可能としている。工作機械との接続はケーブルをつなぐだけで完了、位置補正はビジョンセンサが自動で行うため、わずか15分で設置することができる。
接続対象機種は、同社製の中小型の複合加工機・CNC旋盤・立形マシニングセンタなど。これら複数種類の工作機械が稼働する工場でも、1台の「Ez LOADER 10」の導入でさまざまな設備機の自動化に対応できる。接続機種を時間・日単位で頻繁に切り替える運用や、人に寄り添い作業分担させるといった運用も可能。スペース・人員が限られ、設備機ごとの生産量が常時変動するような工場でも、「Ez LOADER 10」の効果的な活用で働き方を劇的に変えることができる。
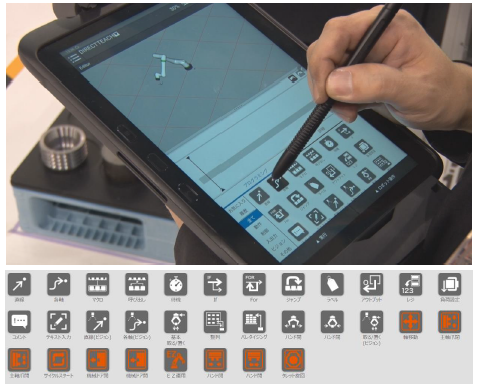
動作設定は専用のテンプレート(ワーク台)に加工物をセットし、ワークの高さなどわずかな情報をタブレット端末に入力するだけで完了。煩雑なロボットティーチング作業は不要であり、生産開始までのリードタイムを大幅に短縮する。また「Ez LOADER 10」は、動作設定のカスタマイズが可能な「ダイレクトティーチ機能」を搭載。手動でロボットアームを動かすことで任意の動作経路を記憶させ、専用ソウトウェア上で作業内容を簡単に追加・変更することができる。ワークに付着した水・切屑の除去動作や、ワーク搬送装置など周辺機器との連携動作など、プログラミングの専門知識が無くてもお客様独自の動作設定が可能である。
同社では、「今後もお客様のニーズに合わせた最適な自動化ソリューションの提供により、製造現場の働き方改革を支援する。」としている。
1. 簡単・迅速な設置(イージー・セットアップ)
設置に必要な作業は、工作機械とEz LOADER 10のケーブル接続のみ。接続後はタブレット端末から指令すると工作機械側の情報を自動で取得、位置補正はビジョンセンサにより自動で行う。
Ez LOADER 10は、同社製の中小型の複合加工機・CNC旋盤・立形マシニングセンタなどに対応(対象ワークは丸物などのチャックワーク、角物ワークは順次対応)。ユニット本体は軽量であるため、人力で簡単に移動させることが可能。異なる設備間での共用や、工場レイアウト変更時の移設作業にも柔軟に対応。
2. テンプレートを用いた簡単段取り ティーチングレス
加工物を付属のテンプレート(ワーク台)に配置し、加工物の高さなどわずかな情報をタブレット端末に入力するだけで加工を開始することができる。なお、ビジョンセンサが加工物の位置を認識して工作機械へ自動搬送するため、ロボットのティーチング作業は不要。

3. ユーザー独自の自動化システムを簡単構築(イージー・カスタム)
ダイレクトティーチ機能を使うことで、手動で任意のロボット動作経路を設定することができる。また、付属のタブレット端末上で動作指令アイコンを並べるだけで、専門知識がなくても本機とロボットの動作設定ができる。ワークに付着した水・切屑の除去動作の設定 や、ワーク搬送装置など周辺機器と連携させた独自の自動化システムを構築することが可能。
■主な仕様

(※Ez L OADER 10)の運用には、工作機械側のロボットインターフェースの準備が必要)